Physics • Year 12 • Module 6 • Lesson 10
DC and AC Motors
Secure the core vocabulary, the function of the split-ring commutator, back emf, and the key differences between DC and AC induction motors before tackling calculations and analysis.
1. Term–definition match
The definitions below are shuffled. In the right-hand column write the matching term from this list: back emf, split-ring commutator, stator, rotor, induction motor, slip rings, brushes, radial magnetic field, torque, synchronous speed. 10 marks (1 each)
| # | Definition | Matching term |
|---|---|---|
| 1.1 | The voltage induced in a spinning motor coil that opposes the applied voltage; increases with motor speed. | |
| 1.2 | A ring split into two halves that reverses current direction in the coil every half-turn, maintaining continuous rotation in a DC motor. | |
| 1.3 | The stationary part of a motor that typically carries the magnets or electromagnets. | |
| 1.4 | The rotating part of a motor, usually the current-carrying coil or squirrel cage. | |
| 1.5 | An AC motor in which a rotating magnetic field from the stator induces currents in the rotor, creating torque without any direct electrical connection to the rotor. | |
| 1.6 | Continuous rings that maintain electrical contact with a rotating coil without reversing the current direction. | |
| 1.7 | Carbon or graphite contacts that press against the commutator to supply current to the rotating coil. | |
| 1.8 | A field geometry in which field lines point directly toward the axis of rotation at every angle, keeping the force on the coil sides perpendicular throughout rotation. | |
| 1.9 | The turning effect produced on the coil by the interaction of current and magnetic field; measured in newton-metres (N m). | |
| 1.10 | The speed at which the stator’s rotating magnetic field completes one full revolution; the rotor of an induction motor always runs slightly slower than this. |
2. True or false — with correction
Circle T or F for each statement. If the statement is false, write the corrected version on the line below it. 12 marks (1 T/F + 1 correction each)
2.1 In a DC motor, the split-ring commutator reverses the current through the coil every full turn. T / F
2.2 Back emf is zero when a DC motor is running at its maximum speed. T / F
2.3 An AC induction motor requires brushes and a commutator to deliver current to the rotor. T / F
2.4 When a DC motor stalls, the back emf is zero and the current is at its maximum value V / R. T / F
2.5 In an AC induction motor, the rotor turns at exactly the same speed as the rotating magnetic field of the stator. T / F
2.6 The radial magnetic field in a DC motor is designed to keep the torque on the coil nearly constant throughout its rotation. T / F
3. Fill-in-the-blank paragraph
Use the word bank to complete the passage. Each word or phrase is used once. 8 marks (1 per blank)
Word bank:
back emf · brushes · commutator · electrical · induced · mechanical · rotor · stator
Both DC and AC motors convert ___________ energy into ___________ energy. In a DC motor, the split-ring ___________ reverses the current every half-turn so that the torque always acts in the same direction. Carbon ___________ press against the commutator to maintain electrical contact with the spinning coil. As the coil rotates, an emf is ___________ in it by Faraday’s Law. This ___________ opposes the applied voltage and grows with motor speed. In an AC induction motor, the ___________ produces a rotating magnetic field; this field induces currents in the ___________, creating torque without any physical electrical connection.
4. Function recall
Answer each question in 1–2 sentences using precise terms from the lesson. 8 marks (2 each)
4.1 What is the purpose of the split-ring commutator in a DC motor?
4.2 Explain why a DC motor draws much more current when it first starts than when it runs at full speed.
4.3 What is “slip” in an AC induction motor, and why is it necessary?
4.4 State one advantage and one disadvantage of an AC induction motor compared to a DC motor.
5. Build a concept map
Draw labelled arrows between the six terms below to show how they are connected. Each arrow must carry a linking phrase (e.g. “opposes”, “increases with”, “reverses”). Aim for at least 6 labelled arrows. 6 marks (1 per valid labelled arrow)
Supplied terms: back emf · motor speed · coil current · applied voltage · commutator · torque.
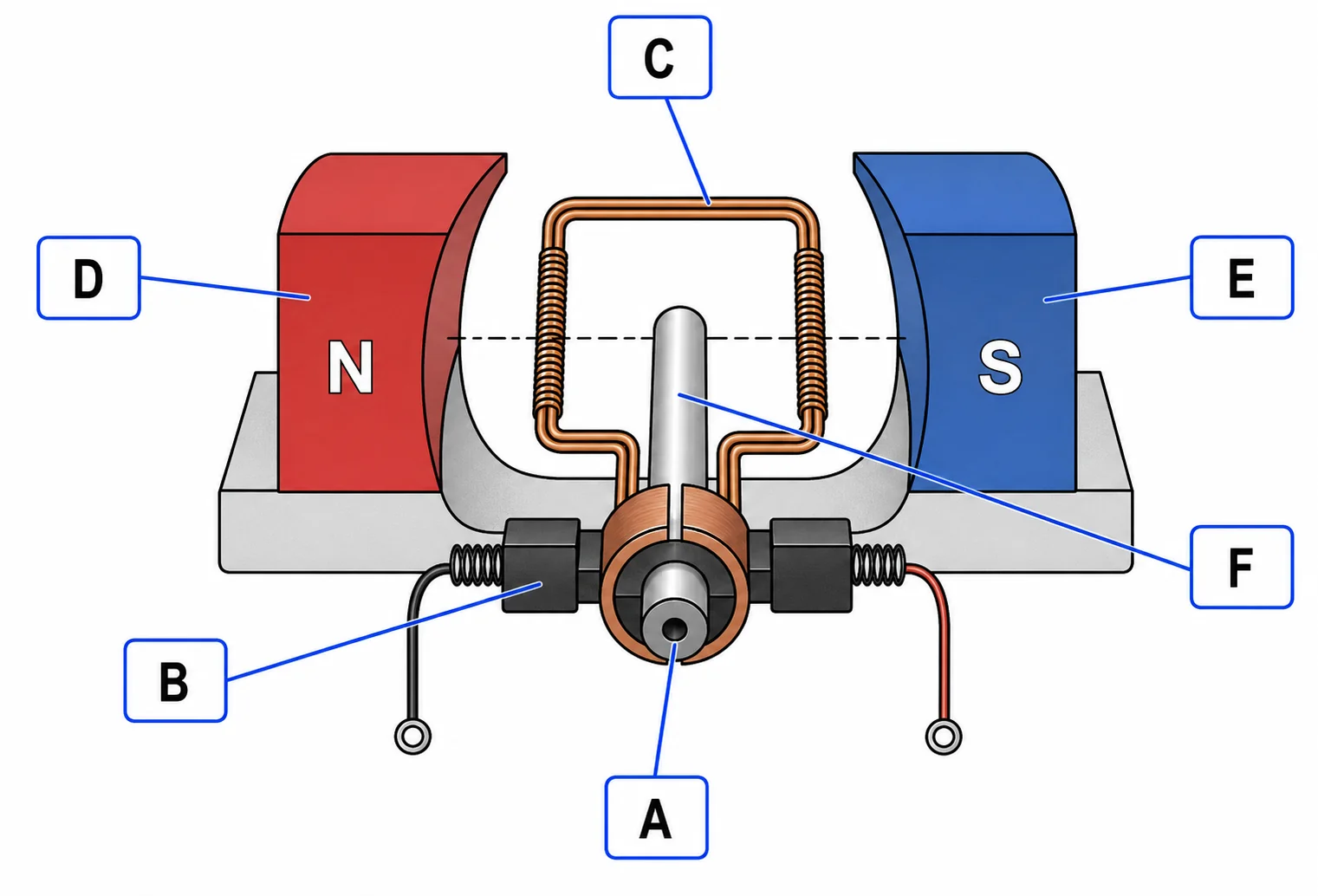
6. Label the DC motor components
The diagram below shows a cross-section of a basic DC motor. Write the correct component name and its function into boxes A–F. 12 marks (1 label + 1 function each)
| Box | Component name | Function in the DC motor |
|---|---|---|
| A | ||
| B | ||
| C | ||
| D | ||
| E | ||
| F |
Q1 — Term–definition match
1.1 back emf • 1.2 split-ring commutator • 1.3 stator • 1.4 rotor • 1.5 induction motor • 1.6 slip rings • 1.7 brushes • 1.8 radial magnetic field • 1.9 torque • 1.10 synchronous speed.
Q2 — True / false with correction
2.1 False. The commutator reverses current every half-turn (every 180°), not every full turn.
2.2 False. Back emf is at its maximum (nearly equal to the applied voltage) when the motor runs at maximum speed. Back emf is zero when the motor is stalled (ω = 0).
2.3 False. An AC induction motor does not use brushes or a commutator. Torque in the rotor is produced by electromagnetic induction from the rotating stator field — there is no direct electrical connection to the rotor.
2.4 True. When stalled, ω = 0 so back emf = 0, and the full applied voltage V drives current through the coil resistance: I = V/R.
2.5 False. The rotor of an induction motor always runs slightly slower than the synchronous speed of the rotating field. This difference (slip) is necessary for electromagnetic induction to occur in the rotor.
2.6 True. A radial field keeps the angle between the field and the coil sides constant at 90° throughout most of the rotation, giving a near-constant torque.
Q3 — Cloze paragraph
In order: electrical / mechanical / commutator / brushes / induced / back emf / stator / rotor.
Q4.1 — Purpose of the split-ring commutator
The split-ring commutator reverses the direction of current through the coil every half-turn. This ensures the torque on the coil always acts in the same rotational direction, producing continuous rotation rather than oscillation.
Q4.2 — High starting current
When the motor first starts, the coil is stationary so there is no back emf (εback = 0). The full applied voltage V drives current through the coil resistance (I = V/R), giving the maximum possible current. As the motor accelerates, back emf increases and opposes V, reducing the net driving voltage and therefore the current.
Q4.3 — Slip in an AC induction motor
Slip is the difference between the synchronous speed of the stator’s rotating magnetic field and the actual (slower) speed of the rotor. It is necessary because electromagnetic induction in the rotor requires a changing magnetic flux — if the rotor matched the field speed exactly, there would be no relative motion, no induction, no induced current, and no torque.
Q4.4 — AC induction motor advantage and disadvantage
Advantage: No brushes or commutator — lower maintenance, no sparking, longer service life. Disadvantage: Speed is determined largely by the AC frequency and is difficult to vary; speed control requires variable-frequency drives. (Also accept: lower starting torque compared to DC motors.)
Q5 — Sample concept map
Accept any valid labelled arrows, for example:
- motor speed — increases → back emf
- back emf — opposes → applied voltage
- applied voltage − back emf — determines → coil current
- coil current — produces → torque
- commutator — reverses current to sustain → torque
- torque — drives → motor speed
Award 1 mark per valid, correctly-phrased labelled arrow (minimum 6).
Q6 — DC motor component labels
A: Split-ring commutator — reverses current through coil every half-turn to maintain rotation direction.
B: Brushes — maintain electrical contact between the external circuit and the rotating commutator.
C: Coil (armature) — carries current; experiences a force in the magnetic field, producing torque.
D: Permanent magnet (N pole) — provides the external magnetic field that exerts force on the current-carrying coil.
E: Permanent magnet (S pole) — provides the other pole of the magnetic field (opposite pole to D).
F: Axle / shaft — transfers the rotational mechanical energy out of the motor to do useful work.